
ศูนย์วิทยาศาสตร์เพื่
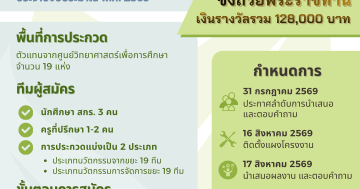
โครงการประกวดโครงงานวิทยาศาสตร์ด้านสิ่งแวดล้อม สำหรับนักศึกษา สกร. ระดับประเทศ ประจำปีงบประมาณ พ.ศ. 2569 รับสมัครนักศึกษา สกร.ที่ได้รับรางวัลชนะเลิศระดับพื้นที่จากการจัดประกวดโดยกลุ่มศูนย์วิทยาศาสตร์เพื่อการศึกษาทั้ง 19 แห่ง ชิงถ้วยพระราชทานจาก สมเด็จพระกนิษฐาธิราชเจ้า กรมสมเด็จพระเทพรัตนราชสุดา ฯ สยามบรมราชกุมารี เงินรางวัลรวม 128,000 บาท พร้อมโล่และเกียรติบัตร เงื่อนไข เมื่อสมัครผ่านช่องทางออนไลน์แล้ว ทีมผู้สมัครต้องนำส่งหลักฐานการสมัคร ซึ่งประกอบด้วย โดยส่งเอกสารทั้งหมดมายัง ศูนย์ส่งเสริมและพัฒนาการเรียนรู้ทางวิทยาศาสตร์ 928 ถ.สุขุมวิท แขวงพระโขนง เขตคลองเตย กรุงเทพฯ 10110 ภายในวันที่ 24 กรกฎาคม 2569 กำหนดการประกวด สอบถามรายละเอียด/ติดต่อผู้ประสานงานโครงการ FacebookFacebookXTwitterLINELine

คุณรู้หรือไม่ ว่าร่างกายของเรานั้นประกอบไปด้วยจุลินทรีย์กว่า 1,000 ชนิด มีจำนวนรวมมากถึง 100 ล้านล้านเซลล์ ในขณะที่มนุษย์มีเพียงแค่ 10 ล้านล้านเซลล์เท่านั้น หรือคิดเป็นอัตราส่วน 10:1 และจุลินทรีย์ส่วนมาก จะอยู่รวมกันตามส่วนต่าง ๆ ของร่างกาย โดยเฉพาะในระบบทางเดินอาหารพบว่ามีจุลินทรีย์อยู่มากถึง 100,000 ล้านตัวเลยทีเดียว ซึ่งมีทั้งจุลินทรีย์ก่อโรคและจุลินทรีย์ที่ก่อให้เกิดประโยชน์แก่ร่างกายที่เราเรียกว่า Probiotics PROBIOTICS คืออะไร ? Probiotics คือจุลินทรีย์ชนิดดีตัวจิ๋วที่อาศัยอยู่ในระบบทางเดินอาหาร และระบบอื่น ๆ ในร่างกายมีคุณสมบัติทนต่อกรดและด่าง สามารถจับที่บริเวณเยื่อบุผิวของลำไส้ แล้วผลิตสารต้านการเจริญเติบโตของเชื้อจุลินทรีย์ก่อโรคชนิดอื่น ทำให้ร่างกายสมดุลส่งผลให้สุขภาพแข็งแรงได้ ประโยชน์ของ PROBIOTICS เพิ่มจุลินทรีย์ที่มีประโยชน์ต่อร่างกาย และลดปริมาณเชื้อจุลินทรีย์ที่ก่อให้เกิดโรค ช่วยให้ขับถ่ายได้เป็นปกติทุกวัน ลดอาการท้องผูกและท้องเสีย ช่วยลดอาการลำไส้แปรปรวน และอาการกรดไหลย้อน ช่วยในการย่อยและดูดซึมสารอาหาร ลดความเสี่ยงโรคหลอดเลือดหัวใจ ช่วยควบคุมระดับคอเลสเตอรอลในเลือด ป้องกันการติดเชื้อในระบบทางเดินหายใจ และการติดเชื้อในทางเดินปัสสาวะ เสริมสร้างภูมิต้านทาน ลดอาการข้างเคียงจากยาปฏิชีวนะ ลดความเสี่ยงในการเป็นมะเร็ง ปัจจัยที่ส่งผลให้ PROBIOTICS ลดลง การใช้ยาปฏิชีวนะมากเกินความจำเป็น นอกจากจะทำลายเชื้อโรคแล้วยังส่งผลต่อเชื้อ Probiotics และเชื้อจุลินทรีย์ที่มีประโยชน์แก่ร่างกายอีกด้วย […]

เป็นศูนย์วิทยาศาสตร์สำหรับเด็กปฐมวัยสังกัดศูนย์วิทยาศาสตร์เพื่อการศึกษา จัดกิจกรรมเรียนรู้วิทยาศาสตร์จากสื่อนิทรรศการโดยทำบทปฏิบัติการประกอบการเล่นเพื่อการเรียนรู้สำหรับเด็กอายุ 3-6 ปี ให้บริการสื่อนิทรรศการภายในอาคาร จำนวน 10 ฐานและสื่อนิทรรศภายนอกอาคาร จำนวน 13 ฐาน นิทรรศการภายในอาคาร ผึ้งกับเสือ, การผจญภัยของหยดน้ำ, ชีวิตในน้ำ, ต้นไม้ ใบหญ้า พืช ผัก ผลไม้, กินให้ฉลาดและโตเร็ว, รู้จักตนเองและเพื่อน, จักรวาลและอวกาศ, สุขสบายคลายเหนื่อย, มุมรักการอ่าน, ฝากอะไรไว้ให้โลก นิทรรศการภายนอกอาคาร ผึ้งกับเสือ, เครื่องเล่นสนาม, เรียนรู้แรงดันน้ำ, เรียนรู้เรื่องสูตรคูณ, วาดฝันกับเม็ดทราย, เรียนรู้การทรงตัว, บ้านต้นไม้, เรียนรู้เลขคู่และคี่, เรียนรู้รูปทรงเรขาคณิต, ฐานสะกดรอย, เรียนรู้เรื่องมุม, เรียนรู้เรื่องจำนวน, เรียนรู้การขนส่งทางน้ำ, ลานนวดเท้า FacebookFacebookXTwitterLINELine

Zone 1 : Small world (โลกใบจิ๋ว) ชวนน้องๆ มารู้จักกับเพื่อนนานาชาติ บนปราสาทหลังน้อย สัมผัสประสบการณ์การแต่งกายนานาชาติ ฟังนิทานเรื่อง “โลกของเรา” invite children to know friends international, on the little castle the experience of international dress listen to the “small world” Zone 2 : Fun Forest (ป่าแสนสนุก) เที่ยวเล่นป่าแสนสนุก พร้อมรู้จักสัตว์ป่านานาชาติ แอบฟังเสียงสัตว์ป่า ดูวงจรชีวิตสัตว์ใต้ดิน ฟังนิทานเรื่อง “บ้านของสัตว์ป่า” และเรื่อง “น้ำฝนมาจากไหน” Play wild fun and as wildlife I hear wildlife […]

ในปัจจุบัน หุ่นยนต์เริ่มเข้ามามีบทบาทกับชีวิตประจำวันของมนุษย์มากขึ้น หลายภาคอุตสาหกรรมเดินหน้าทดลองและพัฒนาหุ่นยนต์อย่างต่อเนื่อง เพื่อหวังเอามาใช้งานแทนพนักงาน ทั้งเพื่อลดรายจ่าย เพิ่มความรวดเร็วในการผลิตและสร้างประสบการณ์ใหม่ ๆ ให้ลูกค้า โดยธุรกิจอาหารถือเป็นภาคส่วนหนึ่งที่ประสบความสำเร็จในการทดลองและพัฒนาการใช้งานหุ่นยนต์ ซึ่งหุ่นยนต์และระบบอัตโนมัติจะถูกนำไปใช้ในอุตสาหกรรมอาหารในลักษณะต่าง ๆ เช่น หุ่นยนต์หยิบจับผลไม้และอาหาร แรงงานมนุษย์ถูกใช้เพื่อป้องกันความเสียหายของผักและผลไม้ แต่ปัจจุบันได้มีการพัฒนาเทคโนโลยีหุ่นยนต์ที่สามารถจับผักและผลไม้โดยไม่สร้างความเสียหาย ซึ่งจะทำให้โรงงานผู้ผลิตอาหารมีขั้นตอนที่มีประสิทธิภาพสูงขึ้นจากเดิมที่อาศัยแรงงานมนุษย์ หุ่นยนต์ตัดและหั่น การตัดและหั่นโดยทั่วไปนั้นเป็นขั้นตอนที่ง่ายและไม่ซับซ้อน แต่ด้วยเทคโนโลยีที่พัฒนามากขึ้นทำให้หุ่นยนต์สามารถตัดและหั่นได้รวดเร็วและแม่นยำมากขึ้นเพื่อลดการใช้แรงงานมนุษย์ หุ่นยนต์ผลิตเค้ก หุ่นยนต์ผลิตเค้กมีตั้งแต่หุ่นยนต์พื้นฐานในการหยิบจับ ตัด บรรจุหีบห่อ ไปจนถึงหุ่นยนต์ที่ทำงานซับซ้อนเช่นการประกอบเค้กหลาย ๆ ชั้นเข้าด้วยกันและหุ่นยนต์ตกแต่งหน้าเค้ก หุ่นยนต์ทำพิซซ่า การใช้หุ่นยนต์ในการทำพิซซ่าช่วยให้สามารถควบคุมคุณภาพของพิซซ่า ช่วยย่นระยะเวลาในการประกอบอาหารได้มากกว่าครึ่งหนึ่งและยังทำให้ประหยัดต้นทุนในการจัดหาแรงงาน หุ่นยนต์เก็บล้าง การใช้หุ่นยนต์ในการเก็บล้างสถานที่และอุปกรณ์จะช่วยลดอัตราการปนเปื้อนในอาหารที่มักมากับมนุษย์ แต่ต้องมีการดูแลความสะอาดของหุ่นยนต์เพื่อป้องกันไม่ให้หุ่นยนต์เป็นแหล่งสะสมเชื้อโรค หุ่นยนต์เสิร์ฟอาหาร จากการแพร่ระบาดของโรคติดเชื้อไวรัสโคโรนา 2019 หรือโรคโควิด 19 ทำให้ร้านอาหารต้องปรับตัว หนึ่งในนั้นคือเรื่องของการบริการ และมาตรการเรื่องสุขอนามัย โดยการใช้หุ่นยนต์แทนมนุษย์ในการบริการ เพื่อลดการสัมผัสและการแพร่กระจายเชื้อ ตัวอย่าง หุ่นยนต์ที่ทำหน้าที่เสิร์ฟอาหาร และดูแลลูกค้าเหมือนเป็นพนักงานคนหนึ่งในร้าน ทำงานเร็ว เป็นมิตรกับทุกคน เสิร์ฟอาหารได้ครั้งละหลายรายการ หุ่นยนต์เสิร์ฟอาหารนี้ได้รับการออกแบบมาให้ใช้งานง่าย มีระบบเซนเซอร์ตรวจจับ สามารถหลบคนและสิ่งของได้ด้วยตัวเอง แหล่งอ้างอิง :https://bit.ly/2U7GEibhttps://bit.ly/360ZZEChttps://bit.ly/3h1oLdWhttps://bit.ly/3qzw1Rt FacebookFacebookXTwitterLINELine